
服务热线:
400-866-0856
服务热线:
400-866-0856

全向动力、深潜稳定、零可见度环境作业。搭载高清摄像、声呐探测、多参数传感器,适用于水下巡检、管道检测、水库观测、水利工程、科研实训。

沿轨自动巡航、自主避障、全天候稳定运行。集成视觉识别、环境监测、异常报警,适用于隧道/管廊/地铁/厂房/电力廊道自动化巡检。
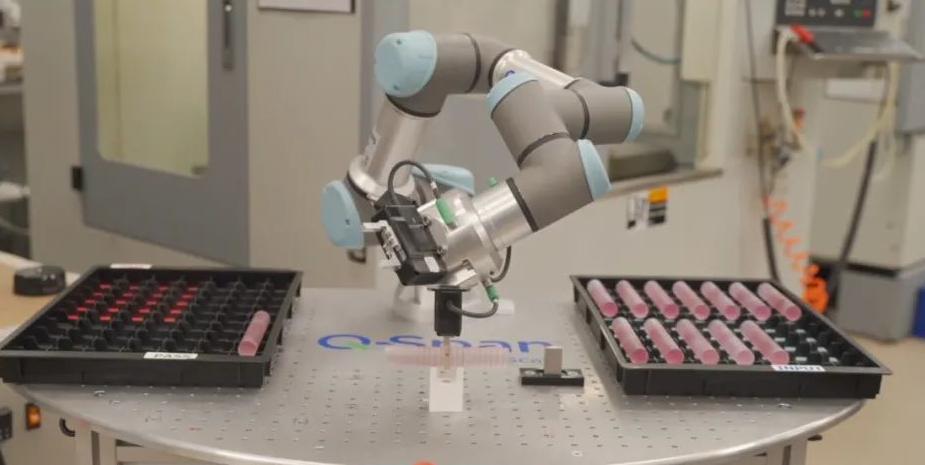
高精度定位、柔性执行、智能抓取。支持AI视觉、自动分拣、缺陷检测,覆盖物流分拣、智能制造、危化作业、教学科研。

可进入市政污水管、供水管、燃气管、工业管网内部作业。搭载高清摄像、爬行底盘、防撞防水、实时回传画面,实现管道破损、堵塞、变形、腐蚀自动检测与定位。

采用主流ROS机器人操作系统与AI深度视觉识别技术,精准定位果实、智能判断成熟度,搭配柔性执行器实现无损采摘,稳定适应复杂田间环境。

搭载多自由度机械臂,定位精准、运动灵活,支持AI深度视觉识别,能自动判断果实成熟度与位置,配合Python、C++多语言编程开发。

基于视觉的物流分拣机器人平台,搭载AI视觉识别与智能机械臂,可快速分拣包裹、快件、物料,已为多所高校物流工程、智能制造专业搭建实训平台。
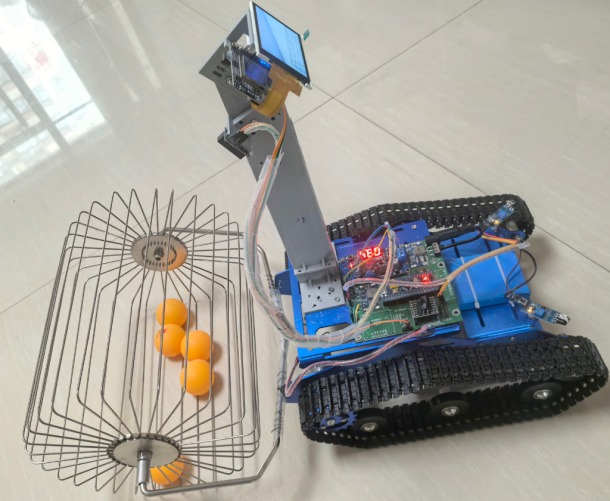
自主导航+自动识别收集一体化设计,可实现场地内球类自动识别、抓取、归集与转运,结构稳定、操作简便,适用于校园科创展示、自动化实训与工程实践项目。

具身开源机械臂,模块化设计稳定可靠、易维护,同时满足自动化与校园科创需求,性价比高、落地性强。